
The Idea
I was made Vice President of the Boise State ASME Mechanical Engineering club. Our club decided to compete in the Human Powered Vehicle Competition or HPVC. The HPVC is a competition to create a fast and versatile bike and compete in challenges and races against other schools.
Original Design
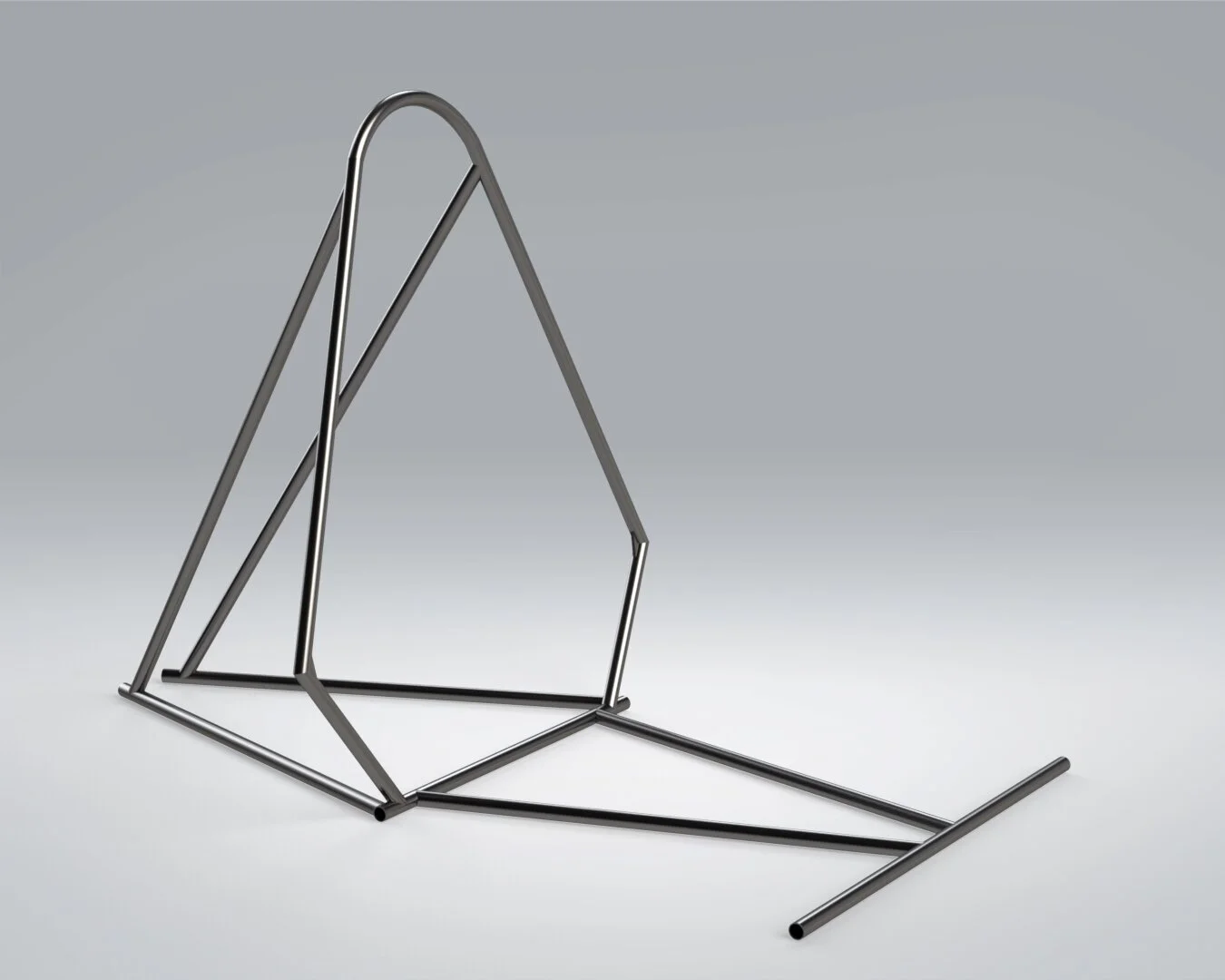
As the sole returning member from the previous year, I approached this year's project with a clear goal: to significantly reduce the frame's weight and enhance the bike's speed. I designed a minimalist frame capable of withstanding all necessary loads, effectively halving the weight compared to last year's model. However, our club faced delays due to prolonged elections and a lengthy setup process. This time constraint led us to realize that we wouldn't be prepared for the main design competition in time. Consequently, we shifted our focus to compete exclusively in the innovation challenge.
The Innovation
Since we were no longer competing in the regular competition, where speed and practicality were key, we decided to channel our efforts into creating the most impressive bike possible. This shift in focus led us to abandon my smaller, lighter frame design in favor of constructing a large, four-wheeled frame with a massive suspension system. We pivoted from designing a lightweight, speedy race bike to crafting a rugged, robust off-road machine. This innovative direction necessitated the development of a full suspension system with ample travel and a differential to efficiently distribute power and facilitate turning in the rear.

What I Learned
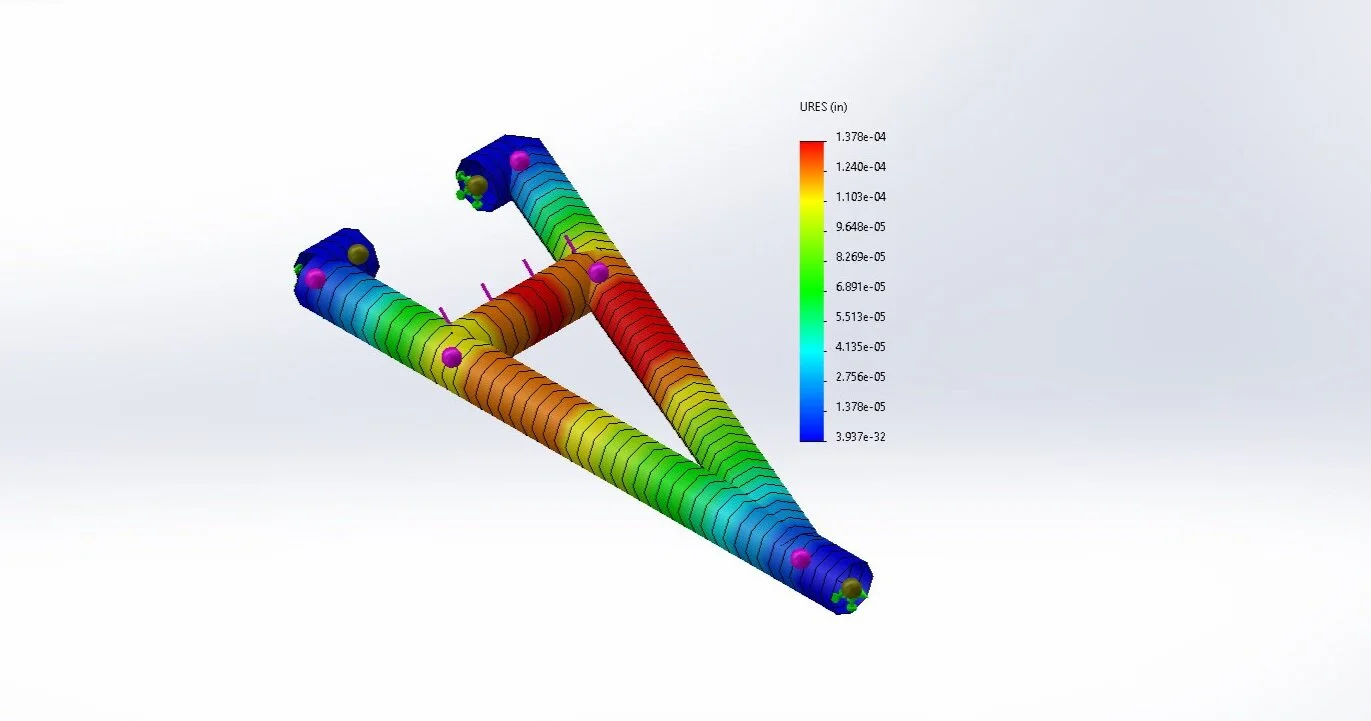
Being a part of this project helped me to develop leadership skills that I ended up using in Senior Design and will end up taking with me into a career. I’ve also learned a lot about weldments in SolidWorks. I came into this not really knowing anything except for the basics and now I feel as if I could make any kind of tube framing. However, the biggest thing I’ve learned from this is simulations in SolidWorks. No one on my team was able to do this and the responsibility was left with me to teach myself how it all works. After days of trial and error I now feel absolutely confident in my ability to simulate forces on SolidWorks.

Conclusion
We submitted our report and presented our innovation. We ended up placing in the middle of the pack. In the end I think we over did it a bit and should have focused on a narrowed innovation. The winner was a simple Arduino controlled speedometer.
Our final design resulted in an A arm front suspension with coil overs. The rear was on a trailing arm suspension with solid axel and a differential also supported with coil overs.